linear_elasticity/multi_point_constraints.py¶
Description
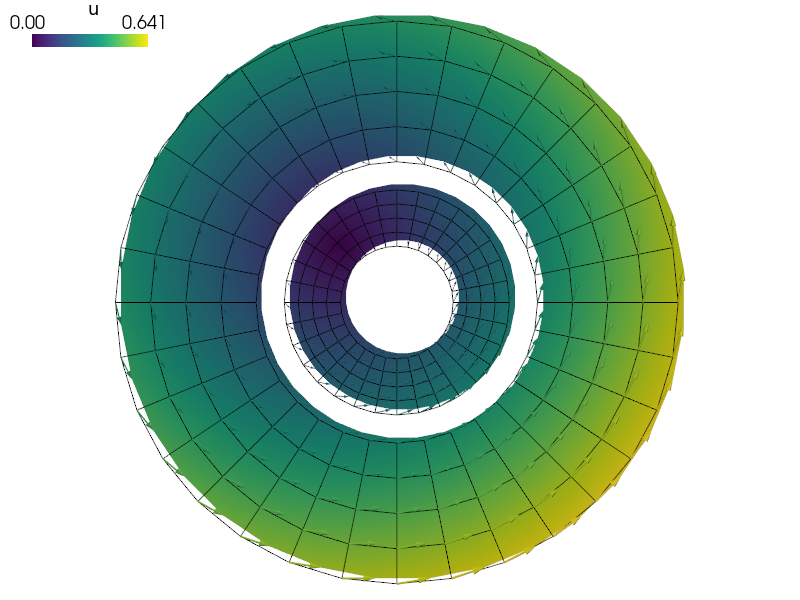
The linear elasticity of two discs connected using multi-point constraints.
Find  ,
,  such that:
such that:

where

 are the DOFs - two displacements and one rotation in 2D -
of the node
are the DOFs - two displacements and one rotation in 2D -
of the node  in
in  , which is a subdomain composed of two
1D spring terms with the generalized stiffness matrix
, which is a subdomain composed of two
1D spring terms with the generalized stiffness matrix  depending
on the directions
depending
on the directions  of the springs and the stiffness vector
of the springs and the stiffness vector
 .
.
The deformation is governed by the Dirichlet conditions applied to one of the
spring end points, see the dofs argument of define() below.
Usage Examples¶
Save and display boundary regions:
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py --save-regions-as-groups --solve-not sfepy-view annulus-c_regions.vtk -2e -f Gamma1:p0 Gamma2:p1 Gamma3:p3 Gamma4:p4 --max-plots=4 --color-map=summer
Run:
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=(0,1)" sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=(0,1), is_rot=False" sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=2"
Display results:
sfepy-view annulus-c.vtk -2e sfepy-view annulus-c.vtk -2e -f u:wu:f1:p0 1:vw:p0 u:gu:p0
r"""
The linear elasticity of two discs connected using multi-point constraints.
Find :math:`\ul{u}`, :math:`\ul{u_c}` such that:
.. math::
\int_{\Omega} D_{ijkl}\ e_{ij}(\ul{v}) e_{kl}(\ul{u})
+ \sum_{i,j \in \Omega_c} K_{kl}\ ((u_c)^{(j)}_l - (u_c)^{(i)}_l)
= 0
\;, \quad \forall \ul{v} \;,
where
.. math::
D_{ijkl} = \mu (\delta_{ik} \delta_{jl}+\delta_{il} \delta_{jk}) +
\lambda \ \delta_{ij} \delta_{kl} \;,
K_{kl} = K_{kl}(\ul{d}, \ul{k}) \;,
:math:`u_c^{(j)}` are the DOFs - two displacements and one rotation in 2D -
of the node :math:`j` in :math:`\Omega_c`, which is a subdomain composed of two
1D spring terms with the generalized stiffness matrix :math:`K_{kl}` depending
on the directions :math:`\ul{d}` of the springs and the stiffness vector
:math:`\ul{k}`.
The deformation is governed by the Dirichlet conditions applied to one of the
spring end points, see the `dofs` argument of :func:`define()` below.
Usage Examples
--------------
- Save and display boundary regions::
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py --save-regions-as-groups --solve-not
sfepy-view annulus-c_regions.vtk -2e -f Gamma1:p0 Gamma2:p1 Gamma3:p3 Gamma4:p4 --max-plots=4 --color-map=summer
- Run::
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=(0,1)"
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=(0,1), is_rot=False"
sfepy-run sfepy/examples/linear_elasticity/multi_point_constraints.py -d "dofs=2"
- Display results::
sfepy-view annulus-c.vtk -2e
sfepy-view annulus-c.vtk -2e -f u:wu:f1:p0 1:vw:p0 u:gu:p0
"""
import numpy as nm
from sfepy.mesh.mesh_generators import gen_cylinder_mesh
from sfepy.discrete.fem.meshio import UserMeshIO
from sfepy.discrete.fem.mesh import Mesh
from sfepy.linalg import get_coors_in_ball
from sfepy.mechanics.matcoefs import stiffness_from_lame
from sfepy.mechanics.tensors import dim2sym
def get_weights(mcoors, scoors):
n_nod, dim = scoors.shape
out = nm.empty((n_nod, dim2sym(dim)))
out[:] = nm.linspace(0, 10, n_nod)[:, None]
return out
def define(dims=(1, 1, 2, 2, 0), shape=(5, 32, 0), order=1, dofs=(0, 1, 2),
is_rot=True, output_dir='.'):
if not isinstance(dofs, tuple):
dofs = (dofs,)
nuc = 2 + is_rot
dofs0 = tuple(set(range(nuc)).difference(dofs))
sdofs = ','.join([f'{ii}' for ii in dofs])
sdofs0 = ','.join([f'{ii}' for ii in dofs0])
def mesh_hook(mesh, mode):
if mode == 'read':
_mesh = gen_cylinder_mesh(dims, shape, (0, 0, 0),
make_2d=True)
_mesh2 = _mesh.copy()
_mesh2.transform_coors(nm.eye(2, dtype=nm.float64) * 2.5)
_mesh = _mesh + _mesh2
# Add constraint vertices (and cells) to the base mesh.
coors, vgroups, conns, mat_ids, descs = _mesh._get_io_data()
nc = coors.shape[0]
coors = nm.r_[coors, nm.zeros((4, 2), dtype=nm.float64)]
vgroups = nm.r_[vgroups, [1, 2, 3, 4]]
conns.append([[nc, nc + 1],
[nc + 2, nc + 3]])
mat_ids.append([1, 2])
descs.append('1_2')
mesh = Mesh.from_data('annulus-c',
coors, vgroups, conns, mat_ids, descs)
return mesh
elif mode == 'write':
pass
filename_mesh = UserMeshIO(mesh_hook)
regions = {
'Omega' : 'all',
'Gamma1' : ('vertices by get_gamma1', 'facet'),
'Gamma2' : ('vertices by get_gamma2', 'facet'),
'Gamma3' : ('vertices by get_gamma3', 'facet'),
'Gamma4' : ('vertices by get_gamma4', 'facet'),
'Omega12C' : ('(vertices of group 1) +v (vertices of group 2)',
'cell', None, {'cell_tdim': 1}),
'Gamma1C' : ('vertices of group 1', 'vertex'),
'Gamma2C' : ('vertices of group 2', 'vertex'),
'Omega34C' : ('(vertices of group 3) +v (vertices of group 4)',
'cell', None, {'cell_tdim': 1}),
'Gamma3C' : ('vertices of group 3', 'vertex'),
'Gamma4C' : ('vertices of group 4', 'vertex'),
'OmegaC' : ('r.Omega12C +c r.Omega34C', 'cell', None, {'cell_tdim': 1})
}
centre = [0, 0]
functions = {
'get_gamma1' : (lambda coors, domain:
get_coors_in_ball(coors, centre, 1.1, 0.9),),
'get_gamma2' : (lambda coors, domain:
get_coors_in_ball(coors, centre, 2.1, 1.9),),
'get_gamma3' : (lambda coors, domain:
get_coors_in_ball(coors, centre, 2.6, 2.4),),
'get_gamma4' : (lambda coors, domain:
get_coors_in_ball(coors, centre, 5.1, 4.9),),
'get_weights' : (get_weights,),
}
fields = {
'fu' : ('real', 2, 'Omega', order),
'fc' : ('real', nuc, 'OmegaC', 1),
}
variables = {
'u' : ('unknown field', 'fu', 0),
'v' : ('test field', 'fu', 'u'),
'uc' : ('unknown field', 'fc', 1),
'vc' : ('test field', 'fc', 'uc'),
}
ebcs = {
'uc' : ('Gamma1C', {f'uc.[{sdofs}]' : 0.1},),
}
if dofs0:
ebcs.update({
'uc0' : ('Gamma1C', {f'uc.[{sdofs0}]' : 0.0},),
})
if not is_rot:
ebcs.update({
'u0' : ('Gamma4', {'u.all' : 0.0}),
})
lcbcs = {
'rigid' : (('Gamma1', 'Gamma2C'), {'u.all' : 'uc.all'},
None, 'rigid2'),
'avg1' : (('Gamma2', 'Gamma3C'), {'u.all' : 'uc.all'},
'get_weights', 'average_force'),
'avg2' : (('Gamma3', 'Gamma4C'), {'u.all' : 'uc.all'},
None, 'average_force'),
}
materials = {
'm' : ({
'D' : stiffness_from_lame(dim=2, lam=1e1, mu=1e0),
'ks' : [[1e+5], [1e+5], [1e+5]][:nuc],
'dvec' : [[0.01], [0.01]],
},),
}
integrals = {
'i' : 2 * order,
}
if is_rot:
equations = {
'eq1' :
"""dw_lin_elastic.i.Omega(m.D, v, u)
+ dw_lin_dspring_rot.0.Omega12C(m.dvec, m.ks, vc, uc)
+ dw_lin_dspring_rot.0.Omega34C(m.dvec, m.ks, vc, uc)
= 0
""",
}
else:
equations = {
'eq1' :
"""dw_lin_elastic.i.Omega(m.D, v, u)
+ dw_lin_dspring.0.Omega12C(m.dvec, m.ks, vc, uc)
+ dw_lin_dspring.0.Omega34C(m.dvec, m.ks, vc, uc)
= 0
""",
}
solvers = {
'ls' : ('ls.auto_direct', {}),
'newton' : ('nls.newton', {
'i_max' : 1,
'eps_a' : -1e-10,
'check' : 0,
}),
}
options = {
'output_dir' : output_dir,
'nls' : 'newton',
'ls' : 'ls',
}
return locals()