large_deformation/perfusion_tl.py¶
Description
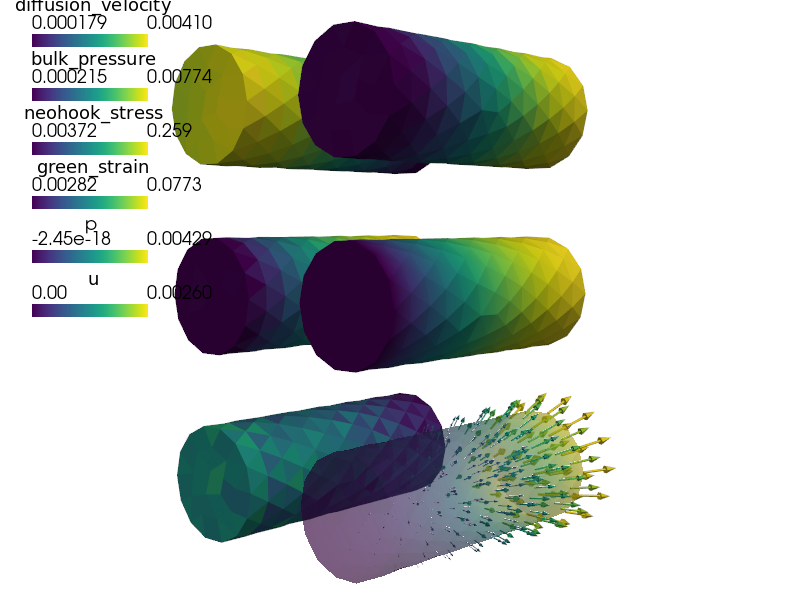
Porous nearly incompressible hyperelastic material with fluid perfusion.
Large deformation is described using the total Lagrangian formulation. Models of this kind can be used in biomechanics to model biological tissues, e.g. muscles.
Find  such that:
such that:
(equilibrium equation with boundary tractions)

(mass balance equation (perfusion))

where
|
deformation gradient |
|
|
|
right Cauchy-Green deformation tensor |
|
Green strain tensor |
|
effective second Piola-Kirchhoff stress tensor |








The effective (neo-Hookean) stress  is given
by:
is given
by:

The linearized deformation-dependent permeability is defined as
 ,
where relates to the previous time step
,
where relates to the previous time step  and
and
 expresses the dependence on volume
compression/expansion.
expresses the dependence on volume
compression/expansion.
# -*- coding: utf-8 -*-
r"""
Porous nearly incompressible hyperelastic material with fluid perfusion.
Large deformation is described using the total Lagrangian formulation.
Models of this kind can be used in biomechanics to model biological
tissues, e.g. muscles.
Find :math:`\ul{u}` such that:
(equilibrium equation with boundary tractions)
.. math::
\intl{\Omega\suz}{} \left( \ull{S}\eff - p J \ull{C}^{-1}
\right) : \delta \ull{E}(\ul{v}) \difd{V}
+ \intl{\Gamma_0\suz}{} \ul{\nu} \cdot \ull{F}^{-1} \cdot \ull{\sigma}
\cdot \ul{v} J \difd{S}
= 0
\;, \quad \forall \ul{v} \;,
(mass balance equation (perfusion))
.. math::
\intl{\Omega\suz}{} q J(\ul{u})
+ \intl{\Omega\suz}{} \ull{K}(\ul{u}\sunm) : \pdiff{q}{X} \pdiff{p}{X}
= \intl{\Omega\suz}{} q J(\ul{u}\sunm)
\;, \quad \forall q \;,
where
.. list-table::
:widths: 20 80
* - :math:`\ull{F}`
- deformation gradient :math:`F_{ij} = \pdiff{x_i}{X_j}`
* - :math:`J`
- :math:`\det(F)`
* - :math:`\ull{C}`
- right Cauchy-Green deformation tensor :math:`C = F^T F`
* - :math:`\ull{E}(\ul{u})`
- Green strain tensor :math:`E_{ij} = \frac{1}{2}(\pdiff{u_i}{X_j} +
\pdiff{u_j}{X_i} + \pdiff{u_m}{X_i}\pdiff{u_m}{X_j})`
* - :math:`\ull{S}\eff(\ul{u})`
- effective second Piola-Kirchhoff stress tensor
The effective (neo-Hookean) stress :math:`\ull{S}\eff(\ul{u})` is given
by:
.. math::
\ull{S}\eff(\ul{u}) = \mu J^{-\frac{2}{3}}(\ull{I}
- \frac{1}{3}\tr(\ull{C}) \ull{C}^{-1})
\;.
The linearized deformation-dependent permeability is defined as
:math:`\ull{K}(\ul{u}) = J \ull{F}^{-1} \ull{k} f(J) \ull{F}^{-T}`,
where :math:`\ul{u}` relates to the previous time step :math:`(n-1)` and
:math:`f(J) = \max\left(0, \left(1 + \frac{(J -
1)}{N_f}\right)\right)^2` expresses the dependence on volume
compression/expansion.
"""
import numpy as nm
from sfepy import data_dir
filename_mesh = data_dir + '/meshes/3d/cylinder.mesh'
# Time-stepping parameters.
t0 = 0.0
t1 = 1.0
n_step = 21
from sfepy.solvers.ts import TimeStepper
ts = TimeStepper(t0, t1, None, n_step)
options = {
'nls' : 'newton',
'ls' : 'ls',
'ts' : 'ts',
'save_times' : 'all',
'post_process_hook' : 'post_process',
}
fields = {
'displacement': ('real', 3, 'Omega', 1),
'pressure' : ('real', 1, 'Omega', 1),
}
materials = {
# Perfused solid.
'ps' : ({
'mu' : 20e0, # shear modulus of neoHookean term
'k' : ts.dt * nm.eye(3, dtype=nm.float64), # reference permeability
'N_f' : 1.0, # reference porosity
},),
# Surface pressure traction.
'traction' : 'get_traction',
}
variables = {
'u' : ('unknown field', 'displacement', 0, 1),
'v' : ('test field', 'displacement', 'u'),
'p' : ('unknown field', 'pressure', 1),
'q' : ('test field', 'pressure', 'p'),
}
regions = {
'Omega' : 'all',
'Left' : ('vertices in (x < 0.001)', 'facet'),
'Right' : ('vertices in (x > 0.099)', 'facet'),
}
##
# Dirichlet BC.
ebcs = {
'l' : ('Left', {'u.all' : 0.0, 'p.0' : 'get_pressure'}),
}
##
# Balance of forces.
integrals = {
'i1' : 1,
'i2' : 2,
}
equations = {
'force_balance'
: """dw_tl_he_neohook.i1.Omega( ps.mu, v, u )
+ dw_tl_bulk_pressure.i1.Omega( v, u, p )
+ dw_tl_surface_traction.i2.Right( traction.pressure, v, u )
= 0""",
'mass_balance'
: """dw_tl_volume.i1.Omega( q, u )
+ dw_tl_diffusion.i1.Omega( ps.k, ps.N_f, q, p, u[-1])
= dw_tl_volume.i1.Omega( q, u[-1] )"""
}
def post_process(out, problem, state, extend=False):
from sfepy.base.base import Struct, debug
val = problem.evaluate('dw_tl_he_neohook.i1.Omega( ps.mu, v, u )',
mode='el_avg', term_mode='strain')
out['green_strain'] = Struct(name='output_data',
mode='cell', data=val, dofs=None)
val = problem.evaluate('dw_tl_he_neohook.i1.Omega( ps.mu, v, u )',
mode='el_avg', term_mode='stress')
out['neohook_stress'] = Struct(name='output_data',
mode='cell', data=val, dofs=None)
val = problem.evaluate('dw_tl_bulk_pressure.i1.Omega( v, u, p )',
mode='el_avg', term_mode='stress')
out['bulk_pressure'] = Struct(name='output_data',
mode='cell', data=val, dofs=None)
val = problem.evaluate('dw_tl_diffusion.i1.Omega( ps.k, ps.N_f, q, p, u[-1] )',
mode='el_avg', term_mode='diffusion_velocity')
out['diffusion_velocity'] = Struct(name='output_data',
mode='cell', data=val, dofs=None)
return out
##
# Solvers etc.
solver_0 = {
'name' : 'ls',
'kind' : 'ls.scipy_direct',
}
solver_1 = {
'name' : 'newton',
'kind' : 'nls.newton',
'i_max' : 7,
'eps_a' : 1e-10,
'eps_r' : 1.0,
'macheps' : 1e-16,
'lin_red' : 1e-2, # Linear system error < (eps_a * lin_red).
'ls_red' : 0.1,
'ls_red_warp': 0.001,
'ls_on' : 1.1,
'ls_min' : 1e-5,
'check' : 0,
'delta' : 1e-6,
}
solver_2 = {
'name' : 'ts',
'kind' : 'ts.simple',
't0' : t0,
't1' : t1,
'dt' : None,
'n_step' : n_step, # has precedence over dt!
'verbose' : 1,
}
##
# Functions.
def get_traction(ts, coors, mode=None):
"""
Pressure traction.
Parameters
----------
ts : TimeStepper
Time stepping info.
coors : array_like
The physical domain coordinates where the parameters shound be defined.
mode : 'qp' or 'special'
Call mode.
"""
if mode != 'qp': return
tt = ts.nt * 2.0 * nm.pi
dim = coors.shape[1]
val = 0.05 * nm.sin(tt) * nm.eye(dim, dtype=nm.float64)
val[1,0] = val[0,1] = 0.5 * val[0,0]
shape = (coors.shape[0], 1, 1)
out = {
'pressure' : nm.tile(val, shape),
}
return out
def get_pressure(ts, coor, **kwargs):
"""Internal pressure Dirichlet boundary condition."""
tt = ts.nt * 2.0 * nm.pi
val = nm.zeros((coor.shape[0],), dtype=nm.float64)
val[:] = 1e-2 * nm.sin(tt)
return val
functions = {
'get_traction' : (lambda ts, coors, mode=None, **kwargs:
get_traction(ts, coors, mode=mode),),
'get_pressure' : (get_pressure,),
}