large_deformation/hyperelastic_ul_up.py¶
Description
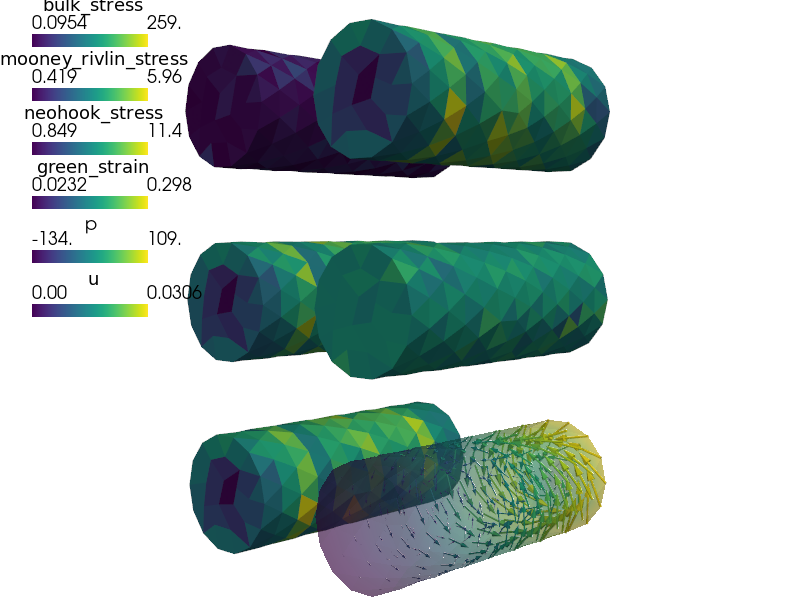
Compressible Mooney-Rivlin hyperelastic material model.
Large deformation is described using the updated Lagrangian formulation. Incompressibility is treated by mixed displacement-pressure formulation. Models of this kind can be used to model e.g. rubber or some biological materials.
# -*- coding: utf-8 -*-
r"""
Compressible Mooney-Rivlin hyperelastic material model.
Large deformation is described using the updated Lagrangian formulation.
Incompressibility is treated by mixed displacement-pressure formulation.
Models of this kind can be used to model e.g. rubber or some biological
materials.
"""
import numpy as nm
from sfepy import data_dir
filename_mesh = data_dir + '/meshes/3d/cylinder.mesh'
options = {
'nls': 'newton',
'ls': 'ls',
'ts': 'ts',
'ulf': True,
'mesh_update_variables': ['u'],
'output_dir': 'output',
'post_process_hook': 'stress_strain',
}
fields = {
'displacement': ('real', 'vector', 'Omega', 1),
'pressure': ('real', 'scalar', 'Omega', 0),
}
materials = {
'solid': ({'iK': 1.0 / 1e3, # bulk modulus
'mu': 20e0, # shear modulus of neoHookean term
'kappa': 10e0, # shear modulus of Mooney-Rivlin term
},),
}
variables = {
'u': ('unknown field', 'displacement', 0),
'v': ('test field', 'displacement', 'u'),
'p': ('unknown field', 'pressure', 1),
'q': ('test field', 'pressure', 'p'),
}
regions = {
'Omega' : 'all',
'Left' : ('vertices in (x < 0.001)', 'facet'),
'Right' : ('vertices in (x > 0.099)', 'facet'),
}
##
# Dirichlet BC + related functions.
ebcs = {
'l' : ('Left', {'u.all' : 0.0}),
'r' : ('Right', {'u.0' : 0.0, 'u.[1,2]' : 'rotate_yz'}),
}
centre = nm.array( [0, 0], dtype = nm.float64 )
def rotate_yz(ts, coor, **kwargs):
from sfepy.linalg import rotation_matrix2d
vec = coor[:,1:3] - centre
angle = 10.0 * ts.step
print('angle:', angle)
mtx = rotation_matrix2d( angle )
vec_rotated = nm.dot( vec, mtx )
displacement = vec_rotated - vec
return displacement
functions = {
'rotate_yz' : (rotate_yz,),
}
def stress_strain( out, problem, state, extend = False ):
from sfepy.base.base import Struct
ev = problem.evaluate
strain = ev('dw_ul_he_neohook.3.Omega( solid.mu, v, u )',
mode='el_avg', term_mode='strain')
out['green_strain'] = Struct(name='output_data',
mode='cell', data=strain, dofs=None)
stress = ev('dw_ul_he_neohook.3.Omega( solid.mu, v, u )',
mode='el_avg', term_mode='stress')
out['neohook_stress'] = Struct(name='output_data',
mode='cell', data=stress, dofs=None)
stress = ev('dw_ul_he_mooney_rivlin.3.Omega( solid.kappa, v, u )',
mode='el_avg', term_mode='stress')
out['mooney_rivlin_stress'] = Struct(name='output_data',
mode='cell', data=stress, dofs=None)
stress = ev('dw_ul_bulk_pressure.3.Omega( v, u, p )',
mode='el_avg', term_mode= 'stress')
out['bulk_stress'] = Struct(name='output_data',
mode='cell', data=stress, dofs=None)
return out
equations = {
'balance': """dw_ul_he_neohook.3.Omega( solid.mu, v, u )
+ dw_ul_he_mooney_rivlin.3.Omega(solid.kappa, v, u)
+ dw_ul_bulk_pressure.3.Omega( v, u, p ) = 0""",
'volume': """dw_ul_volume.3.Omega( q, u )
+ dw_ul_compressible.3.Omega( solid.iK, q, p, u ) = 0"""
}
##
# Solvers etc.
solvers = {
'ls': ('ls.scipy_direct', {}),
'newton': ('nls.newton', {
'i_max': 25,
'eps_a': 1e-8,
'eps_r': 1.0,
'macheps': 1e-16,
'lin_red': 1e-2, # Linear system error < (eps_a * lin_red).
'ls_red': 0.1,
'ls_red_warp': 0.001,
'ls_on': 1.1,
'ls_min': 1e-5,
'check': 0,
'delta': 1e-6,
}),
'ts': ('ts.simple', {
't0': 0,
't1': 1,
'dt': None,
'n_step': 11, # has precedence over dt!
'verbose' : 1,
}),
}