large_deformation/active_fibres.py¶
Description
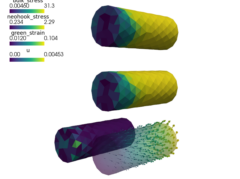
Nearly incompressible hyperelastic material model with active fibres.
Large deformation is described using the total Lagrangian formulation. Models of this kind can be used in biomechanics to model biological tissues, e.g. muscles.
Find  such that:
such that:

where
|
deformation gradient |
|
|
|
right Cauchy-Green deformation tensor |
|
Green strain tensor |
|
effective second Piola-Kirchhoff stress tensor |








The effective stress  incorporates also the
effects of the active fibres in two preferential directions:
incorporates also the
effects of the active fibres in two preferential directions:

The first term is the neo-Hookean term and the sum add contributions of
the two fibre systems. The tensors  are defined by the fibre system direction vectors
are defined by the fibre system direction vectors
 (unit).
(unit).
For the one-dimensional tensions  holds simply (
holds simply ( omitted):
omitted):

# -*- coding: utf-8 -*-
r"""
Nearly incompressible hyperelastic material model with active fibres.
Large deformation is described using the total Lagrangian formulation.
Models of this kind can be used in biomechanics to model biological
tissues, e.g. muscles.
Find :math:`\ul{u}` such that:
.. math::
\intl{\Omega\suz}{} \left( \ull{S}\eff(\ul{u})
+ K(J-1)\; J \ull{C}^{-1} \right) : \delta \ull{E}(\ul{v}) \difd{V}
= 0
\;, \quad \forall \ul{v} \;,
where
.. list-table::
:widths: 20 80
* - :math:`\ull{F}`
- deformation gradient :math:`F_{ij} = \pdiff{x_i}{X_j}`
* - :math:`J`
- :math:`\det(F)`
* - :math:`\ull{C}`
- right Cauchy-Green deformation tensor :math:`C = F^T F`
* - :math:`\ull{E}(\ul{u})`
- Green strain tensor :math:`E_{ij} = \frac{1}{2}(\pdiff{u_i}{X_j} +
\pdiff{u_j}{X_i} + \pdiff{u_m}{X_i}\pdiff{u_m}{X_j})`
* - :math:`\ull{S}\eff(\ul{u})`
- effective second Piola-Kirchhoff stress tensor
The effective stress :math:`\ull{S}\eff(\ul{u})` incorporates also the
effects of the active fibres in two preferential directions:
.. math::
\ull{S}\eff(\ul{u}) = \mu J^{-\frac{2}{3}}(\ull{I}
- \frac{1}{3}\tr(\ull{C}) \ull{C}^{-1})
+ \sum_{k=1}^2 \tau^k \ull{\omega}^k
\;.
The first term is the neo-Hookean term and the sum add contributions of
the two fibre systems. The tensors :math:`\ull{\omega}^k =
\ul{d}^k\ul{d}^k` are defined by the fibre system direction vectors
:math:`\ul{d}^k` (unit).
For the one-dimensional tensions :math:`\tau^k` holds simply (:math:`^k`
omitted):
.. math::
\tau = A f_{\rm max} \exp{\left\{-(\frac{\epsilon - \varepsilon_{\rm
opt}}{s})^2\right\}} \mbox{ , } \epsilon = \ull{E} : \ull{\omega}
\;.
"""
from __future__ import print_function
from __future__ import absolute_import
import numpy as nm
from sfepy import data_dir
filename_mesh = data_dir + '/meshes/3d/cylinder.mesh'
vf_matrix = 0.5
vf_fibres1 = 0.2
vf_fibres2 = 0.3
options = {
'nls' : 'newton',
'ls' : 'ls',
'ts' : 'ts',
'save_times' : 'all',
'post_process_hook' : 'stress_strain',
}
fields = {
'displacement': (nm.float64, 3, 'Omega', 1),
}
materials = {
'solid' : ({
'K' : vf_matrix * 1e3, # bulk modulus
'mu' : vf_matrix * 20e0, # shear modulus of neoHookean term
},),
'f1' : 'get_pars_fibres1',
'f2' : 'get_pars_fibres2',
}
def get_pars_fibres(ts, coors, mode=None, which=0, vf=1.0, **kwargs):
"""
Parameters
----------
ts : TimeStepper
Time stepping info.
coors : array_like
The physical domain coordinates where the parameters shound be defined.
mode : 'qp' or 'special'
Call mode.
which : int
Fibre system id.
vf : float
Fibre system volume fraction.
"""
if mode != 'qp': return
fmax = 10.0
eps_opt = 0.01
s = 1.0
tt = ts.nt * 2.0 * nm.pi
if which == 0: # system 1
fdir = nm.array([1.0, 0.0, 0.0], dtype=nm.float64)
act = 0.5 * (1.0 + nm.sin(tt - (0.5 * nm.pi)))
elif which == 1: # system 2
fdir = nm.array([0.0, 1.0, 0.0], dtype=nm.float64)
act = 0.5 * (1.0 + nm.sin(tt + (0.5 * nm.pi)))
else:
raise ValueError('unknown fibre system! (%d)' % which)
fdir.shape = (3, 1)
fdir /= nm.linalg.norm(fdir)
print(act)
shape = (coors.shape[0], 1, 1)
out = {
'fmax' : vf * nm.tile(fmax, shape),
'eps_opt' : nm.tile(eps_opt, shape),
's' : nm.tile(s, shape),
'fdir' : nm.tile(fdir, shape),
'act' : nm.tile(act, shape),
}
return out
functions = {
'get_pars_fibres1' : (lambda ts, coors, mode=None, **kwargs:
get_pars_fibres(ts, coors, mode=mode, which=0,
vf=vf_fibres1, **kwargs),),
'get_pars_fibres2' : (lambda ts, coors, mode=None, **kwargs:
get_pars_fibres(ts, coors, mode=mode, which=1,
vf=vf_fibres2, **kwargs),),
}
variables = {
'u' : ('unknown field', 'displacement', 0),
'v' : ('test field', 'displacement', 'u'),
}
regions = {
'Omega' : 'all',
'Left' : ('vertices in (x < 0.001)', 'facet'),
'Right' : ('vertices in (x > 0.099)', 'facet'),
}
##
# Dirichlet BC.
ebcs = {
'l' : ('Left', {'u.all' : 0.0}),
}
##
# Balance of forces.
integral_1 = {
'name' : 'i',
'order' : 1,
}
equations = {
'balance'
: """dw_tl_he_neohook.i.Omega( solid.mu, v, u )
+ dw_tl_bulk_penalty.i.Omega( solid.K, v, u )
+ dw_tl_fib_a.i.Omega( f1.fmax, f1.eps_opt, f1.s, f1.fdir, f1.act,
v, u )
+ dw_tl_fib_a.i.Omega( f2.fmax, f2.eps_opt, f2.s, f2.fdir, f2.act,
v, u )
= 0""",
}
def stress_strain(out, problem, state, extend=False):
from sfepy.base.base import Struct, debug
ev = problem.evaluate
strain = ev('dw_tl_he_neohook.i.Omega( solid.mu, v, u )',
mode='el_avg', term_mode='strain')
out['green_strain'] = Struct(name='output_data',
mode='cell', data=strain, dofs=None)
stress = ev('dw_tl_he_neohook.i.Omega( solid.mu, v, u )',
mode='el_avg', term_mode='stress')
out['neohook_stress'] = Struct(name='output_data',
mode='cell', data=stress, dofs=None )
stress = ev('dw_tl_bulk_penalty.i.Omega( solid.K, v, u )',
mode='el_avg', term_mode= 'stress')
out['bulk_stress'] = Struct(name='output_data',
mode='cell', data=stress, dofs=None)
return out
##
# Solvers etc.
solver_0 = {
'name' : 'ls',
'kind' : 'ls.scipy_direct',
}
solver_1 = {
'name' : 'newton',
'kind' : 'nls.newton',
'i_max' : 7,
'eps_a' : 1e-10,
'eps_r' : 1.0,
'macheps' : 1e-16,
'lin_red' : 1e-2, # Linear system error < (eps_a * lin_red).
'ls_red' : 0.1,
'ls_red_warp': 0.001,
'ls_on' : 1.1,
'ls_min' : 1e-5,
'check' : 0,
'delta' : 1e-6,
}
solver_2 = {
'name' : 'ts',
'kind' : 'ts.simple',
't0' : 0,
't1' : 1,
'dt' : None,
'n_step' : 21, # has precedence over dt!
'verbose' : 1,
}