linear_elasticity/elastic_contact_sphere.py¶
Description
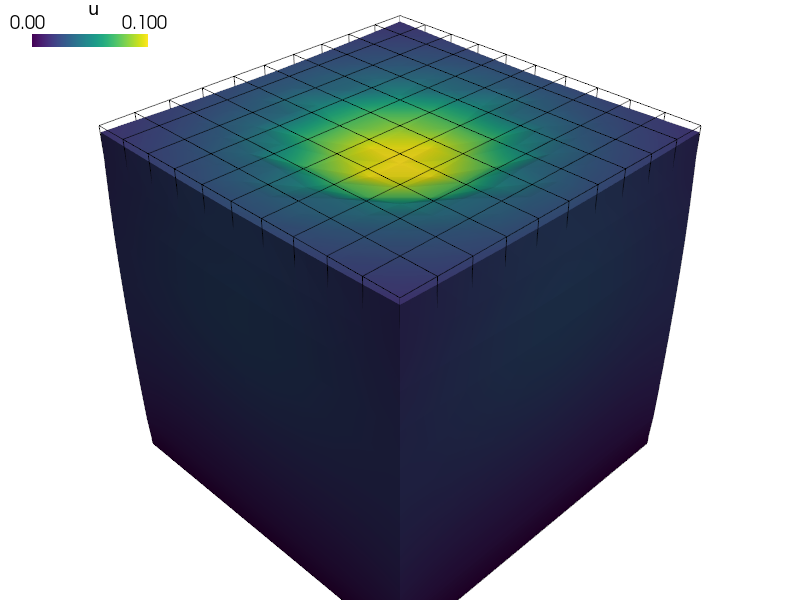
Elastic contact sphere simulating an indentation test.
Find  such that:
such that:

where

Notes¶
Even though the material is linear elastic and small deformations are used, the problem is highly nonlinear due to contacts with the sphere. See also elastic_contact_planes.py example.
r"""
Elastic contact sphere simulating an indentation test.
Find :math:`\ul{u}` such that:
.. math::
\int_{\Omega} D_{ijkl}\ e_{ij}(\ul{v}) e_{kl}(\ul{u})
+ \int_{\Gamma} \ul{v} \cdot f(d(\ul{u})) \ul{n}(\ul{u})
= 0 \;,
where
.. math::
D_{ijkl} = \mu (\delta_{ik} \delta_{jl} + \delta_{il} \delta_{jk}) +
\lambda \ \delta_{ij} \delta_{kl}
\;.
Notes
-----
Even though the material is linear elastic and small deformations are used, the
problem is highly nonlinear due to contacts with the sphere. See also
elastic_contact_planes.py example.
"""
from sfepy import data_dir
from sfepy.mechanics.matcoefs import stiffness_from_lame
filename_mesh = data_dir + '/meshes/3d/cube_medium_hexa.mesh'
k = 1e5 # Elastic sphere stiffness for positive penetration.
f0 = 1e-2 # Force at zero penetration.
options = {
'nls' : 'newton',
'ls' : 'ls',
'output_format': 'vtk',
}
fields = {
'displacement': ('real', 3, 'Omega', 1),
}
materials = {
'solid' : ({
'D': stiffness_from_lame(dim=3, lam=5.769, mu=3.846),
},),
'cs' : ({
'f' : [k, f0],
'.c' : [0.0, 0.0, 1.0],
'.r' : 0.8,
},),
}
variables = {
'u' : ('unknown field', 'displacement', 0),
'v' : ('test field', 'displacement', 'u'),
}
regions = {
'Omega' : 'all',
'Bottom' : ('vertices in (z < -0.499)', 'facet'),
'Top' : ('vertices in (z > 0.499)', 'facet'),
}
ebcs = {
'fixed' : ('Bottom', {'u.all' : 0.0}),
}
equations = {
'elasticity' :
"""dw_lin_elastic.2.Omega(solid.D, v, u)
+ dw_contact_sphere.6.Top(cs.f, cs.c, cs.r, v, u)
= 0""",
}
solvers = {
'ls' : ('ls.scipy_direct', {}),
'newton' : ('nls.newton', {
'i_max' : 50,
'eps_a' : 1e-14,
'eps_r' : 1e-8,
'eps_mode' : 'or',
'step_red' : 0.8,
'ls_on' : 2.0,
'check' : 0,
'delta' : 1e-6,
}),
}
def main():
import os
from itertools import product
import numpy as nm
import matplotlib.pyplot as plt
from sfepy.discrete.fem import MeshIO
from sfepy.mechanics.contact_bodies import ContactSphere, plot_points
conf_dir = os.path.dirname(__file__)
io = MeshIO.any_from_filename(filename_mesh, prefix_dir=conf_dir)
bb = io.read_bounding_box()
outline = [vv for vv in product(*bb.T)]
ax = plot_points(None, nm.array(outline), 'r*')
csc = materials['cs'][0]
cs = ContactSphere(csc['.c'], csc['.r'])
pps = (bb[1] - bb[0]) * nm.random.rand(5000, 3) + bb[0]
mask = cs.mask_points(pps, 0.0)
ax = plot_points(ax, cs.centre[None, :], 'b*', ms=30)
ax = plot_points(ax, pps[mask], 'kv')
ax = plot_points(ax, pps[~mask], 'r.')
plt.show()
if __name__ == '__main__':
main()