acoustics/vibro_acoustic3d.py¶
Description
Vibro-acoustic problem
3D acoustic domain with 2D perforated deforming interface.
Master problem: defined in 3D acoustic domain (vibro_acoustic3d.py)
Slave subproblem: 2D perforated interface (vibro_acoustic3d_mid.py)
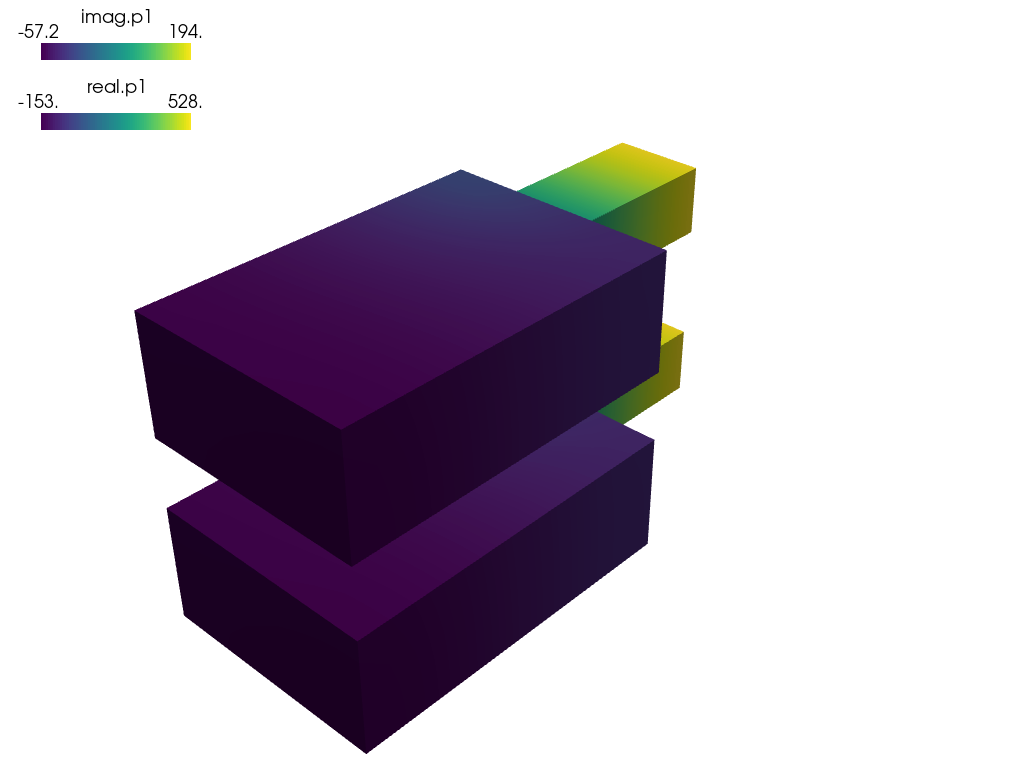
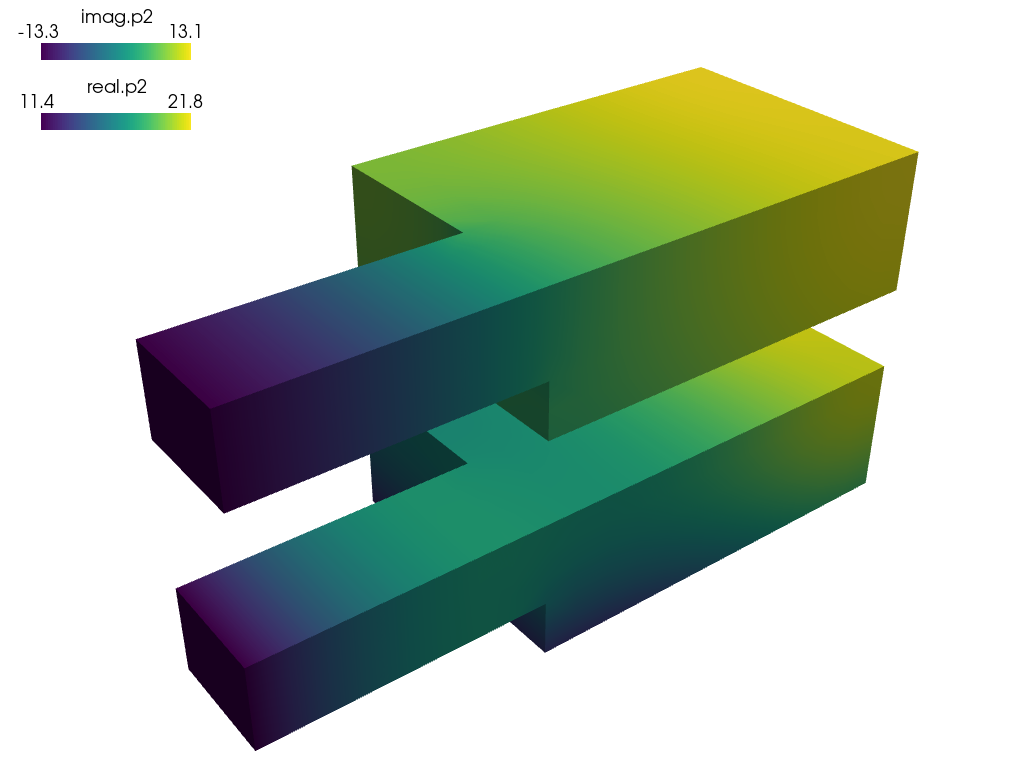
Master 3D problem - find  (acoustic pressure)
and
(acoustic pressure)
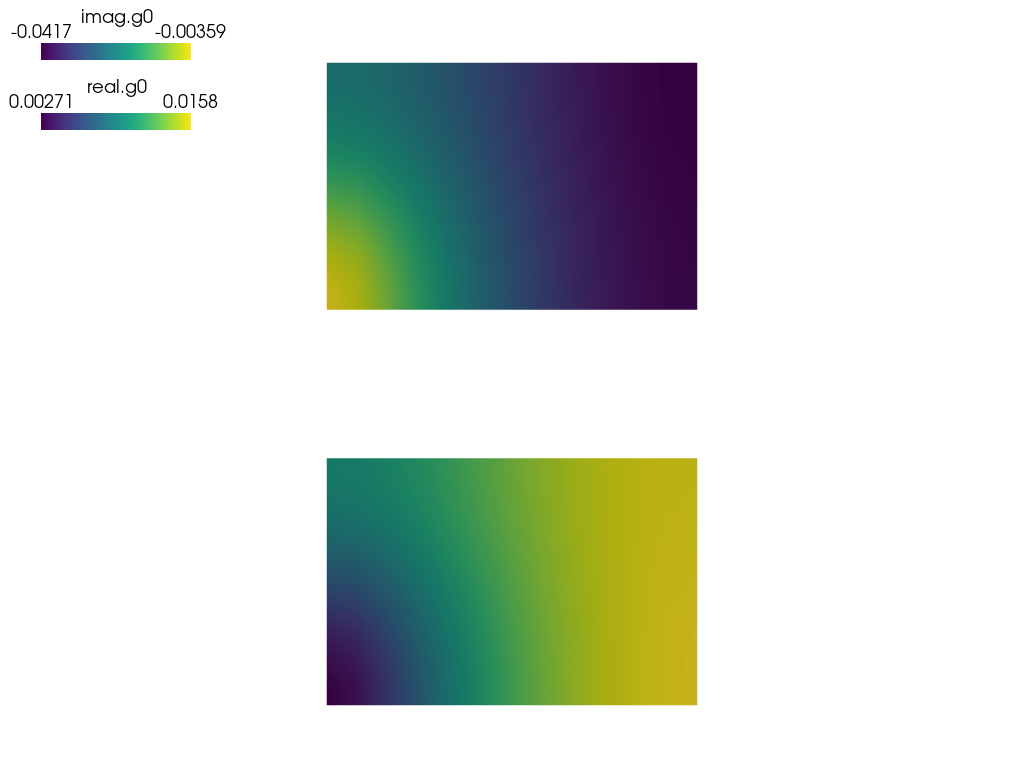
and  (transversal acoustic velocity) such that:
(transversal acoustic velocity) such that:

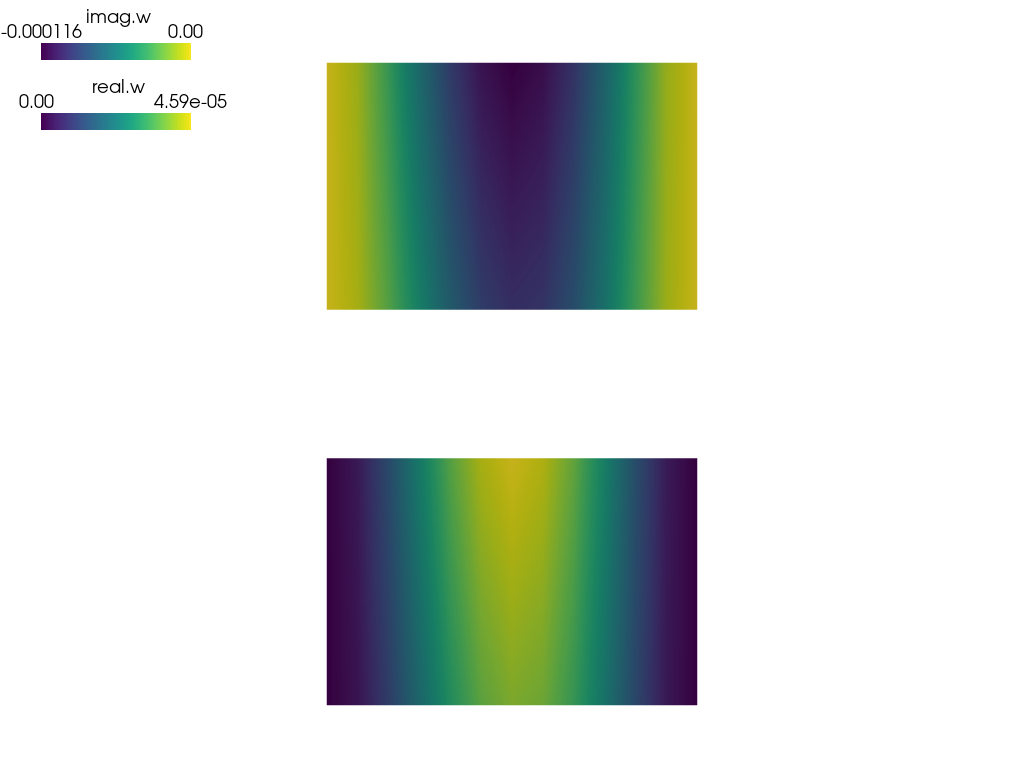
Slave 2D subproblem - find  (plate deflection)
and
(plate deflection)
and  (rotation) such that:
(rotation) such that:

r"""
Vibro-acoustic problem
3D acoustic domain with 2D perforated deforming interface.
*Master problem*: defined in 3D acoustic domain (``vibro_acoustic3d.py``)
*Slave subproblem*: 2D perforated interface (``vibro_acoustic3d_mid.py``)
Master 3D problem - find :math:`p` (acoustic pressure)
and :math:`g` (transversal acoustic velocity) such that:
.. math::
c^2 \int_{\Omega} \nabla q \cdot \nabla p
- \omega^2 \int_{\Omega} q p
+ i \omega c \int_{\Gamma_{in}} q p
+ i \omega c \int_{\Gamma_{out}} q p
- i \omega c^2 \int_{\Gamma_0} (q^+ - q^-) g
= 2i \omega c \int_{\Gamma_{in}} q \bar{p}
\;, \quad \forall q \;,
- i \omega \int_{\Gamma_0} f (p^+ - p^-)
- \omega^2 \int_{\Gamma_0} F f g
+ \omega^2 \int_{\Gamma_0} C f w
= 0
\;, \quad \forall f \;,
Slave 2D subproblem - find :math:`w` (plate deflection)
and :math:`\ul{\theta}` (rotation) such that:
.. math::
\omega^2 \int_{\Gamma_0} C z g
- \omega^2 \int_{\Gamma_0} S z w
+ \int_{\Gamma_0} \nabla z \cdot \ull{G} \cdot \nabla w
- \int_{\Gamma_0} \ul{\theta} \cdot \ull{G} \cdot \nabla z
= 0
\;, \quad \forall z \;,
- \omega^2 \int_{\Gamma_0} R\, \ul{\nu} \cdot \ul{\theta}
+ \int_{\Gamma_0} D_{ijkl} e_{ij}(\ul{\nu}) e_{kl}(\ul{\theta})
- \int_{\Gamma_0} \ul{\nu} \cdot \ull{G} \cdot \nabla w
+ \int_{\Gamma_0} \ul{\nu} \cdot \ull{G} \cdot \ul{\theta}
= 0
\;, \quad \forall \ul{\nu} \;,
"""
from __future__ import absolute_import
from sfepy import data_dir
filename_mesh = data_dir + '/meshes/3d/acoustic_wg.vtk'
sound_speed = 343.0
wave_num = 5.5
p_inc = 300
c = sound_speed
c2 = c**2
w = wave_num * c
w2 = w**2
wc = w * c
wc2 = w * c2
regions = {
'Omega1': 'cells of group 1',
'Omega2': 'cells of group 2',
'GammaIn': ('vertices of group 1', 'face'),
'GammaOut': ('vertices of group 2', 'face'),
'Gamma_aux': ('r.Omega1 *v r.Omega2', 'face'),
'Gamma0_1': ('copy r.Gamma_aux', 'face', 'Omega1'),
'Gamma0_2': ('copy r.Gamma_aux', 'face', 'Omega2'),
'aux_Left': ('vertices in (x < 0.001)', 'face'),
'aux_Right': ('vertices in (x > 0.299)', 'face'),
'Gamma0_1_Left': ('r.Gamma0_1 *v r.aux_Left', 'edge'),
'Gamma0_1_Right': ('r.Gamma0_1 *v r.aux_Right', 'edge'),
}
fields = {
'pressure1': ('complex', 'scalar', 'Omega1', 1),
'pressure2': ('complex', 'scalar', 'Omega2', 1),
'tvelocity': ('complex', 'scalar', 'Gamma0_1', 1),
'deflection': ('complex', 'scalar', 'Gamma0_1', 1),
}
variables = {
'p1': ('unknown field', 'pressure1', 0),
'q1': ('test field', 'pressure1', 'p1'),
'p2': ('unknown field', 'pressure2', 1),
'q2': ('test field', 'pressure2', 'p2'),
'g0': ('unknown field', 'tvelocity', 2),
'f0': ('test field', 'tvelocity', 'g0'),
'w': ('unknown field', 'deflection', 3),
'z': ('test field', 'deflection', 'w'),
}
ebcs = {
'fixed_l': ('Gamma0_1_Left', {'w.0': 0.0}),
'fixed_r': ('Gamma0_1_Right', {'w.0': 0.0}),
}
options = {
'file_per_var': True,
}
functions = {
}
materials = {
'ac' : ({'F': -2.064e+00, 'c': -1.064e+00}, ),
}
equations = {
'eq_1' : """
%e * dw_laplace.5.Omega1(q1, p1)
+ %e * dw_laplace.5.Omega2(q2, p2)
- %e * dw_volume_dot.5.Omega1(q1, p1)
- %e * dw_volume_dot.5.Omega2(q2, p2)
+ %s * dw_surface_dot.5.GammaIn(q1, p1)
+ %s * dw_surface_dot.5.GammaOut(q2, p2)
- %s * dw_surface_dot.5.Gamma0_1(q1, g0)
+ %s * dw_surface_dot.5.Gamma0_2(q2, tr(g0))
= %s * dw_surface_integrate.5.GammaIn(q1)"""\
% (c2, c2, w2, w2,
1j * wc, 1j * wc,
1j * wc2, 1j * wc2,
2j * wc * p_inc),
'eq_2' : """
- %s * dw_surface_dot.5.Gamma0_1(f0, p1)
+ %s * dw_surface_dot.5.Gamma0_1(f0, tr(p2))
- %e * dw_surface_dot.5.Gamma0_1(ac.F, f0, g0)
+ %e * dw_surface_dot.5.Gamma0_1(ac.c, f0, w)
= 0"""\
% (1j * w, 1j * w, w2, w2),
}
solvers = {
'ls': ('ls.cm_pb',
{'others': [data_dir
+ '/examples/acoustics/vibro_acoustic3d_mid.py'],
'coupling_variables': ['g0', 'w'],
}),
'nls': ('nls.newton', {
'i_max' : 1,
'eps_a' : 1e-6,
'eps_r' : 1e-6,
})
}