linear_elasticity/two_bodies_contact.py¶
Description
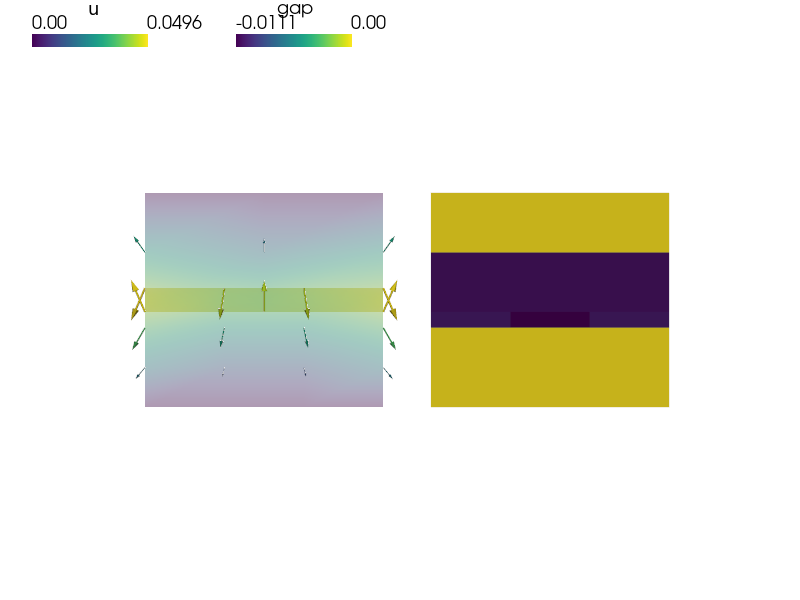
Contact of two elastic bodies with a penalty function for enforcing the contact constraints.
Find  such that:
such that:

where  is the penalty
function,
is the penalty
function,  is the normal penalty parameter,
is the normal penalty parameter,  are the Macaulay’s brackets of the gap function
are the Macaulay’s brackets of the gap function
 and
and

This example also demonstrates use of an experimental contact term based on the IPC Toolkit [1].
[1] https://github.com/ipc-sim/ipc-toolkit
Usage examples:
# Check regions and EBC nodes.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py --save-regions-as-groups --save-ebc-nodes --solve-not
sfepy-view two_bodies_ebc_nodes.vtk
sfepy-view two_bodies_regions.h5
# Run with default parameters and view results.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py
sfepy-view output/contact/two_bodies.h5
sfepy-view output/contact/two_bodies.h5 -f u:wu:f1:p0 1:vw:wu:f1:p0
# Plot the nonlinear solver convergence.
python3 sfepy/scripts/plot_logs.py output/contact/log.txt
# Run with default parameters and IPC toolkit, view results.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py -d "contact='ipc'"
sfepy-view output/contact/two_bodies.h5 -f u:wu:f1:p0 1:vw:wu:f1:p0
# Plot the IPC contact parameters evolution.
python3 sfepy/scripts/plot_logs.py output/contact/clog.txt
r"""
Contact of two elastic bodies with a penalty function for enforcing the contact
constraints.
Find :math:`\ul{u}` such that:
.. math::
\int_{\Omega} D_{ijkl}\ e_{ij}(\ul{v}) e_{kl}(\ul{u})
+ \int_{\Gamma_{c}} \varepsilon_N \langle g_N(\ul{u}) \rangle \ul{n} \ul{v}
= 0
\;, \quad \forall \ul{v} \;,
where :math:`\varepsilon_N \langle g_N(\ul{u}) \rangle` is the penalty
function, :math:`\varepsilon_N` is the normal penalty parameter, :math:`\langle
g_N(\ul{u}) \rangle` are the Macaulay's brackets of the gap function
:math:`g_N(\ul{u})` and
.. math::
D_{ijkl} = \mu (\delta_{ik} \delta_{jl}+\delta_{il} \delta_{jk}) +
\lambda \ \delta_{ij} \delta_{kl}
\;.
This example also demonstrates use of an experimental contact term based on the
IPC Toolkit [1].
[1] https://github.com/ipc-sim/ipc-toolkit
Usage examples::
# Check regions and EBC nodes.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py --save-regions-as-groups --save-ebc-nodes --solve-not
sfepy-view two_bodies_ebc_nodes.vtk
sfepy-view two_bodies_regions.h5
# Run with default parameters and view results.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py
sfepy-view output/contact/two_bodies.h5
sfepy-view output/contact/two_bodies.h5 -f u:wu:f1:p0 1:vw:wu:f1:p0
# Plot the nonlinear solver convergence.
python3 sfepy/scripts/plot_logs.py output/contact/log.txt
# Run with default parameters and IPC toolkit, view results.
sfepy-run sfepy/examples/linear_elasticity/two_bodies_contact.py -d "contact='ipc'"
sfepy-view output/contact/two_bodies.h5 -f u:wu:f1:p0 1:vw:wu:f1:p0
# Plot the IPC contact parameters evolution.
python3 sfepy/scripts/plot_logs.py output/contact/clog.txt
"""
import os.path as op
from functools import partial
import inspect
from sfepy.base.base import output
from sfepy.base.log import Log
from sfepy.mechanics.matcoefs import stiffness_from_youngpoisson
from sfepy.discrete.fem.meshio import UserMeshIO
from sfepy.solvers.nls import apply_line_search_ipc as apply_line_search
import numpy as nm
def get_bbox(dims, centre, eps=0.0):
dims = nm.asarray(dims)
centre = nm.asarray(centre)
bbox = nm.r_[[centre - (0.5 - eps) * dims], [centre + (0.5 - eps) * dims]]
return bbox
def gen_two_bodies(dims0, shape0, centre0, dims1, shape1, centre1, shift1):
from sfepy.discrete.fem import Mesh
from sfepy.mesh.mesh_generators import gen_block_mesh
m0 = gen_block_mesh(dims0, shape0, centre0)
m1 = gen_block_mesh(dims1, shape1, centre1)
coors = nm.concatenate((m0.coors, m1.coors + shift1), axis=0)
desc = m0.descs[0]
c0 = m0.get_conn(desc)
c1 = m1.get_conn(desc)
conn = nm.concatenate((c0, c1 + m0.n_nod), axis=0)
ngroups = nm.zeros(coors.shape[0], dtype=nm.int32)
ngroups[m0.n_nod:] = 1
mat_id = nm.zeros(conn.shape[0], dtype=nm.int32)
mat_id[m0.n_el:] = 1
name = 'two_bodies'
mesh = Mesh.from_data(name, coors, ngroups, [conn], [mat_id], m0.descs)
return mesh
def markdown_table_from_dict(adict):
header = '| option | value |\n'
separator = '| --- | --- |\n'
rows = '\n'.join([f'| {key} | {val} |' for key, val in adict.items()])
return header + separator + rows
def define(
dims0=(1.0, 1.0, 0.5),
shape0=(2, 2, 2),
centre0=(0, 0, -0.25),
dims1=(1.2, 0.8, 0.5),
shape1=(3, 3, 2),
centre1=(0, 0, 0.25),
shift10=(0.0, 0.0, 1e-4),
shift11=(0.0, 0.0, -0.1),
young=1.0,
poisson=0.3,
rho=1.0,
cm=None,
ck=0.0,
dhat=1e-2,
pspd='NONE',
t1=1000,
n_step=5,
contact='builtin',
output_dir='output/contact',
verbose=True,
):
args = locals()
inodir = partial(op.join, output_dir)
output.set_output(filename=inodir('output_log.txt'), quiet=not verbose,
combined=True)
signature = inspect.signature(define)
arg_names = list(signature.parameters.keys())
options = {name : args[name] for name in arg_names}
table = markdown_table_from_dict(options)
with open(inodir('options.md'), 'w') as fd:
fd.write(table)
dim = len(dims0)
shape0 = shape0[:dim]
centre0 = centre0[:dim]
dims1 = dims1[:dim]
shape1 = shape1[:dim]
centre1 = centre1[:dim]
shift10 = shift10[:dim]
shift11 = shift11[:dim]
shift11 = nm.array(shift11)
clog = Log([[r'$d$'], [r'$k$'], [r'$\nabla B$'], [r'$\nabla E$']],
xlabels=['', '', 'all iterations', 'all iterations'],
ylabels=[r'$d$', r'$k$', r'$\nabla B$', r'$\nabla E$'],
yscales=['log', 'linear', 'linear', 'linear'],
is_plot=False,
log_filename=inodir('clog.txt'),
formats=[['%.8e']] * 4)
def mesh_hook(mesh, mode):
if mode == 'read':
return gen_two_bodies(dims0, shape0, centre0,
dims1, shape1, centre1, shift10)
elif mode == 'write':
pass
def post_process(out, pb, state, extend=False):
from sfepy.base.base import Struct
from sfepy.discrete.fem import extend_cell_data
ev = pb.evaluate
gap = ev('dw_contact.i.Contact(contact.epss, v, u)',
mode='el_avg', term_mode='gap')
gap = extend_cell_data(gap, pb.domain, 'Contact', val=0.0,
is_surface=True)
out['gap'] = Struct(name='output_data',
mode='cell', data=gap, dofs=None)
return out
filename_mesh = UserMeshIO(mesh_hook)
options = {
'nls' : 'newton',
'ls' : 'ls',
'output_dir' : output_dir,
'output_format' : 'h5',
'post_process_hook' : 'post_process',
}
bbox0 = get_bbox(dims0, centre0, eps=1e-5)
bbox1 = get_bbox(dims1, nm.asarray(centre1) + nm.asarray(shift10), eps=1e-5)
if dim == 2:
regions = {
'Omega' : 'all',
'Omega0' : 'cells of group 0',
'Omega1' : 'cells of group 1',
'Bottom' : ('vertices in (y < %.12e)' % bbox0[0, 1], 'facet'),
'Top' : ('vertices in (y > %.12e)' % bbox1[1, 1], 'facet'),
'Contact0' : ('(vertices in (y > %.12e) *v r.Omega0)' % bbox0[1, 1],
'facet'),
'Contact1' : ('(vertices in (y < %.12e) *v r.Omega1)' % bbox1[0, 1],
'facet'),
'Contact' : ('r.Contact0 +s r.Contact1', 'facet')
}
else:
regions = {
'Omega' : 'all',
'Omega0' : 'cells of group 0',
'Omega1' : 'cells of group 1',
'Bottom' : ('vertices in (z < %.12e)' % bbox0[0, 2], 'facet'),
'Top' : ('vertices in (z > %.12e)' % bbox1[1, 2], 'facet'),
'Contact0' : ('(vertices in (z > %.12e) *v r.Omega0)' % bbox0[1, 2],
'facet'),
'Contact1' : ('(vertices in (z < %.12e) *v r.Omega1)' % bbox1[0, 2],
'facet'),
'Contact' : ('r.Contact0 +s r.Contact1', 'facet')
}
fields = {
'displacement': ('real', dim, 'Omega', 1),
}
variables = {
'u' : ('unknown field', 'displacement', 0),
'v' : ('test field', 'displacement', 'u'),
}
ebcs = {
'fixb' : ('Bottom', {'u.all' : 0.0}),
'fixt' : ('Top', {'u.all' : 'move_top'}),
}
def move_top(ts, coors, bc, problem, **kwargs):
val = nm.empty_like(coors)
val[:] = ts.nt * shift11
return val
functions = {
'move_top' : (move_top,),
}
volume = nm.prod(dims0) + nm.prod(dims1)
mass = volume * rho
materials = {
'solid' : ({
'D' : stiffness_from_youngpoisson(dim, young=young, poisson=poisson),
},),
'contact' : ({
'.m' : cm if cm is not None else mass,
'.k' : ck, # 0 = Adaptive barrier stiffness.
'.dhat' : dhat,
'.Pspd' : pspd,
'.epss' : 2e+1,
},),
}
integrals = {
'i' : 2,
}
if contact == 'builtin':
equations = {
'elasticity' :
"""
dw_lin_elastic.2.Omega(solid.D, v, u)
+ dw_contact.i.Contact(contact.epss, v, u)
= 0
""",
}
elif contact == 'ipc':
equations = {
'elasticity' :
"""
dw_lin_elastic.2.Omega(solid.D, v, u)
+ dw_contact_ipc.i.Contact(
contact.m, contact.k, contact.dhat, contact.Pspd, v, u
)
= 0
""",
}
else:
raise ValueError("contact argument can be one of 'builtin', 'ipc'!")
if contact == 'ipc':
apply_ls = partial(apply_line_search, clog=clog)
else:
apply_ls = None
solvers = {
'ls' : ('ls.auto_direct', {}),
'newton' : ('nls.newton', {
'i_max' : 30,
'eps_a' : 1e-8,
'eps_r' : 1e-8,
'eps_mode' : 'or',
'macheps' : 1e-16,
# Linear system error < (eps_a * lin_red).
'lin_red' : None,
'line_search_fun' : apply_ls,
'ls_red' : 0.5,
'ls_red_warp' : 0.5,
'ls_on' : 1.0,
'ls_min' : 1e-5,
'check' : 0,
'delta' : 1e-8,
'log' : {'text' : inodir('log.txt')},
'log_vlines' : 'solve',
}),
'ts' : ('ts.simple', {
't0' : 0.0,
't1' : t1,
'dt' : None,
'n_step' : n_step,
'quasistatic' : True,
'verbose' : 1,
}),
}
return locals()